|
นักวิจัย
ผศ.ดร. สุภชัย วงศ์บุณย์ยง
นายอภิสิทธิ์ ทากุดเรือ สถาบันวิทยาการหุ่นยนต์ภาค มหาวิทยาลัยเทคโนโลยีพระจอมเกล้าธนบุรี |
||||||
|
สถานภาพสิทธิบัตร
คำขออนุสิทธิบัตร เลขที่คำขอ 2103001911 ยื่นคำขอวันที่ 1 ตุลาคม 2564
|
||||||
|
ที่มา ข้อมูลเบื้องต้น ความสำคัญของปัญหา
ในปัจจุบันระบบหุ่นยนต์เคลื่อนที่อัตโนมัติ (Autonomous Mobile Robot, AMR) ที่ใช้สำหรับการเคลื่อนย้ายวัตถุ จะถูกออกแบบแยกกันเป็น 2 ประเภท คือ ประกอบด้วยโมดูล (Module) สำหรับการลาก (Towing) หรือการยก (Lifting) อย่างใดอย่างหนึ่งเท่านั้น ซึ่งการนำระบบหุ่นยนต์เคลื่อนที่อัตโนมัติมาใช้ในโรงพยาบาล เพื่อเคลื่อนย้ายรถเข็นที่มีลักษณะการจับยึดของผู้ใช้งานที่แตกต่างกัน คือ แบบที่มีมือจับเป็นคานยาว และแบบที่ไม่มีมือจับเป็นคานยาว จะใช้ระบบหุ่นยนต์เคลื่อนที่อัตโนมัติที่ลักษณะและกระบวนการที่แตกต่างกัน โดยแบบที่มีมือจับเป็นคานยาวจะเคลื่อนโดยการลากและแบบที่ไม่มีมือจับเป็นคานยาวจะเคลื่อนโดยการยก ดังนั้น ผู้ใช้งานจึงจำเป็นต้องมีระบบหุ่นยนต์เคลื่อนที่อัตโนมัติหลายคันหากต้องการการทำงานทั้งสองรูปแบบที่ ซึ่งยังไม่มีหุ่นยนต์เคลื่อนที่อัตโนมัติที่มีทั้ง ระบบการลาก และระบบการยกในคันเดียวกัน
|
||||||
|
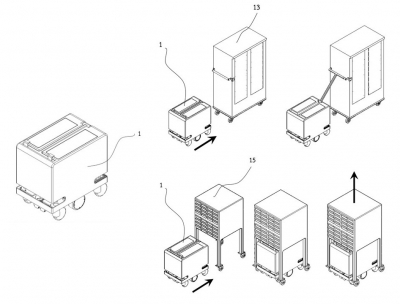
สรุปและจุดเด่นเทคโนโลยี
ระบบนี้เป็นระบบหุ่นยนต์เคลื่อนที่อัตโนมัติ (Autonomous Mobile Robot, AMR) ที่มีส่วนประกอบสำคัญที่ใช้สำหรับการขนย้ายรถเข็นหลายรูปแบบ โดยเน้นการประยุกต์ใช้งานในโรงพยาบาลเพื่อขนส่งวัตถุสิ่งของประเภทต่าง ๆ ได้แก่ อาหาร ยา เครื่องนุ่งห่ม และเครื่องมือแพทย์ เป็นต้น ซึ่งการประดิษฐ์นี้สามารถรวมการทำงานทั้งสองรูปแบบ คือ โมดูลสำหรับการลากและการยก ไว้ในหุ่นยนต์เคลื่อนที่อัตโนมัติคันเดียวกัน (2-in-1) ซึ่งเป็นการเพิ่มความสามารถของหุ่นยนต์เคลื่อนที่อัตโนมัติหนึ่งคันให้สามารถทำงานได้หลากหลายประเภทยิ่งขึ้น ส่งผลให้กระบวนการสำหรับการเคลื่อนย้ายสิ่งของเป็นไปอย่างมีประสิทธิภาพยิ่งขึ้น รวมถึงการลดความจำเป็นในการใช้หุ่นยนต์เคลื่อนที่อัตโนมัติหลายคันเพื่อเคลื่อนย้ายรถเข็น อีกทั้งการออกแบบส่วนที่เป็นฮาร์ดแวร์รวมถึงกระบวนการในการจับยึดกับรถเข็นทั้งสองลักษณะถูกออกแบบให้มีความยืดหยุ่นสามารถเคลื่อนย้ายรถเข็นที่มีขนาดและลักษณะที่หลากหลายได้
|
||||||
|
ความร่วมมือที่เสาะหา
เสาะหาผู้รับอนุญาตใช้สิทธิ
|
||||||
|
สถานภาพของผลงานวิจัย
ต้นแบบระดับ pilot scale ได้ถูกทดสอบในสภาวะทำงานจริง (TRL7)
|
||||||
 |
||||||
|
เงื่อนไข
เทคโนโลยีต่อรองราคา
|
||||||
|
สนใจสอบถามข้อมูล
งานถ่ายทอดเทคโนโลยี มหาวิทยาลัยเทคโนโลยีพระจอมเกล้าธนบุรี |
||||||
|